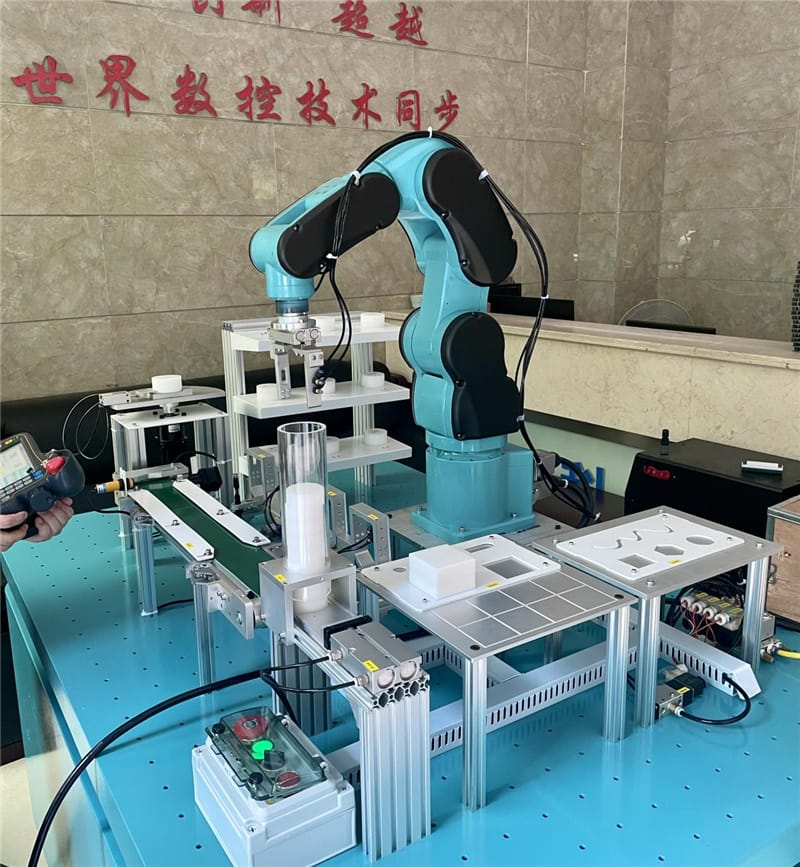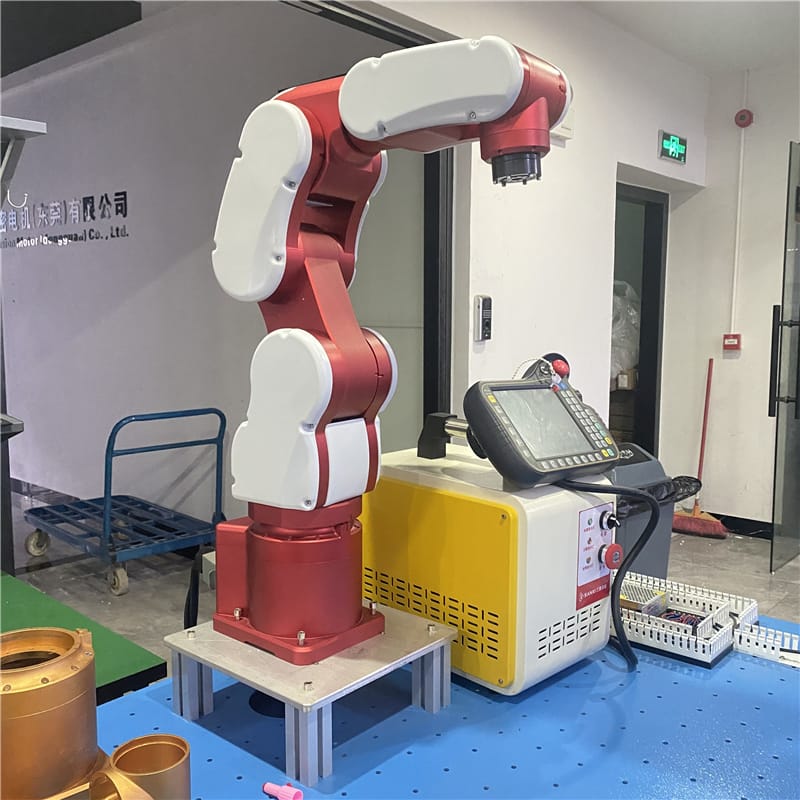




६-अक्ष शिक्षा वा आर्टिक्युलेटेड रोबोट आर्म DIY डेल्टा वा क्यामेरा रोबोट आर्म
निर्दिष्टीकरण
अक्ष:६
अधिकतम पेलोड: ४ किलोग्राम
दोहोरिएको स्थान: ±०.०१ मिमी
उपयोग आर्द्रता: २०-८०%
ऋषि वातावरण: ०℃-४५℃
स्थापना: जमिन
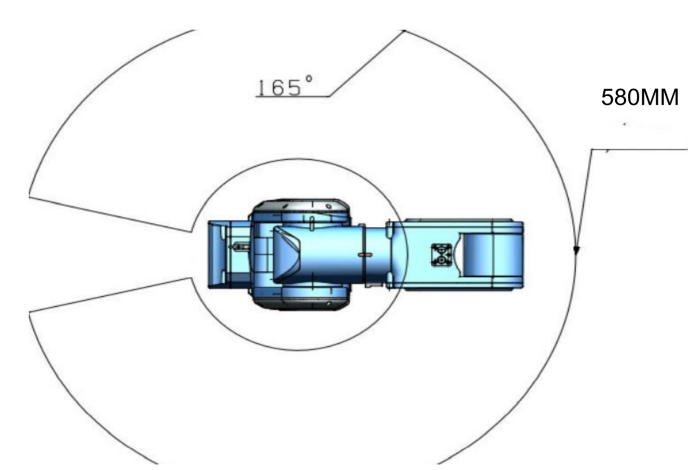
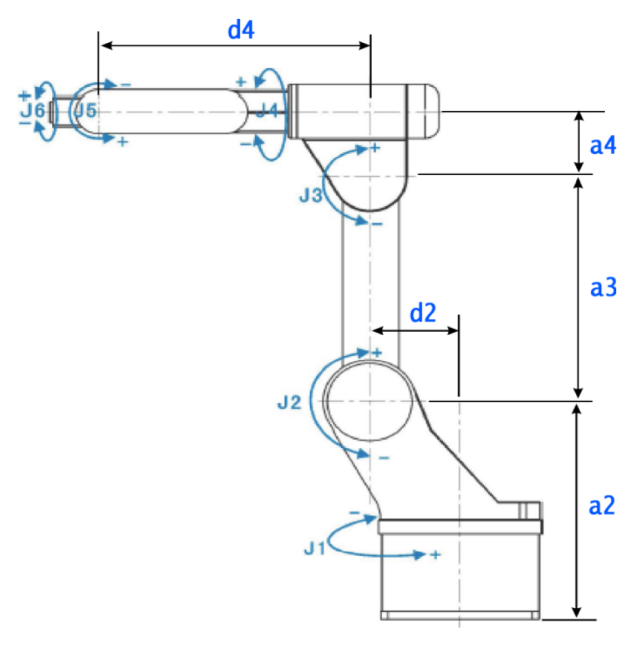
काम गर्ने दायरा: J1:±165°
J२:-१००°~+१२०°
J3:+१५०° ~-६०°
J४:±१७५°
J५:+१३०° ~-३०°
J6: ±१८०°
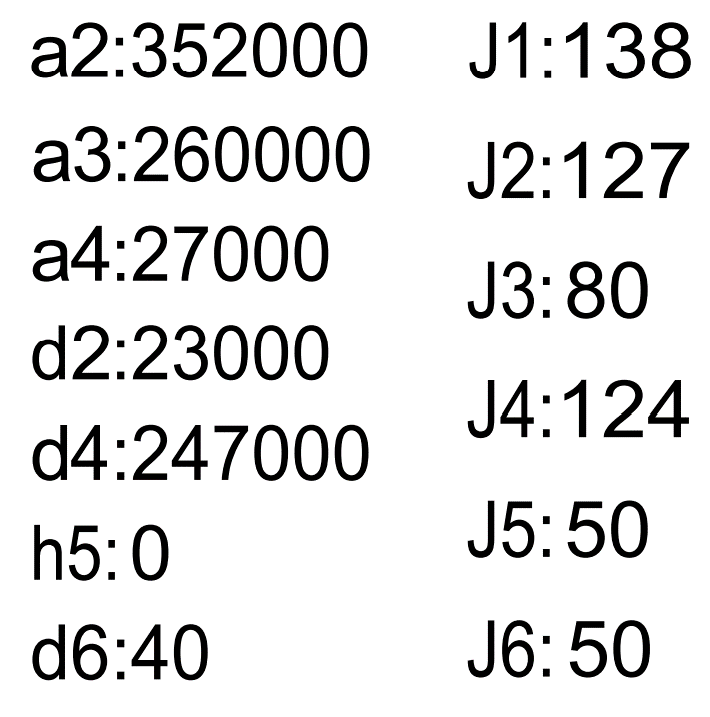
अधिकतम गति: J१:२६०°/सेकेन्ड
J२:२५०°/सेकेन्ड
J३:२५०°/सेकेन्ड
J४:२५०°/सेकेन्ड
J५:२००°/सेकेन्ड
J6:760°/सेकेन्ड
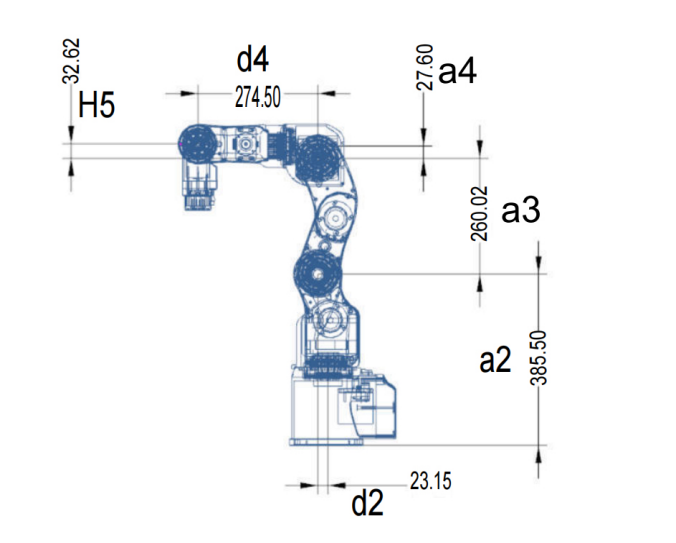
काम गर्ने दायरा:
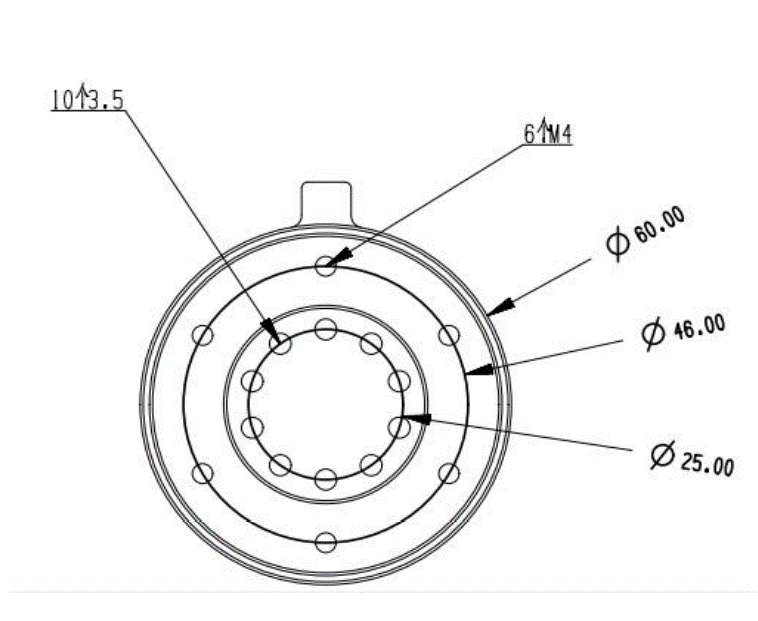
आधार स्थापना:
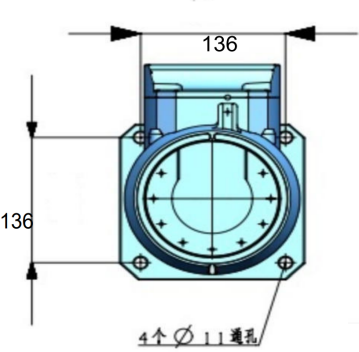
आधार स्थापना:
अनुप्रयोगहरू
शैक्षिक अनुप्रयोगहरू:
१. रोबोट प्रणालीको आधारभूत संरचना अध्ययन गर्न।
२. रोबोट सिकाउने पेन्डेन्टको प्रोग्रामिङ र शिक्षण कार्यहरू अध्ययन गर्न।
३. रोबोट अफलाइन प्रोग्रामिङको आधारभूत ज्ञान अध्ययन गर्न।
४. रोबोट io को सञ्चालन र अनुप्रयोग प्रोग्रामिङ अध्ययन गर्ने।
५. रोबोट दृश्य अनुप्रयोगहरूको अध्ययन गर्न
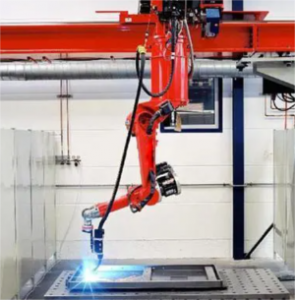
व्यावसायिक दृश्यहरू: रोबोट आइसक्रिम रोबोट बारटेन्डर रोबोट कफी रोबोट दूध चिया हल्का उद्योग दृश्यहरू: नाप्ने वितरण निरीक्षण क्रमबद्ध गर्ने
उत्पादन सुविधाहरू
रोबोटिक आर्म: रोबोटिक आर्म CNC मेसिनिङ सेन्टर मार्फत एल्युमिनियम कास्टिङबाट बनेको हुन्छ, र सतहमा प्लास्टिक छर्किएको हुन्छ र यसको सुन्दर उपस्थिति हुन्छ।
आरक्षित केबल प्वाल: रोबोट हातमा आरक्षित केबल प्वालहरू छन्, जुन सुन्दर छन् र म्यानिपुलेटरको सञ्चालनमा बाधा पुर्याउँदैनन्। श्वासनलीको अन्त्य पोर्ट र डाटा केबल कनेक्टरको लागि आरक्षित गरिएको छ।
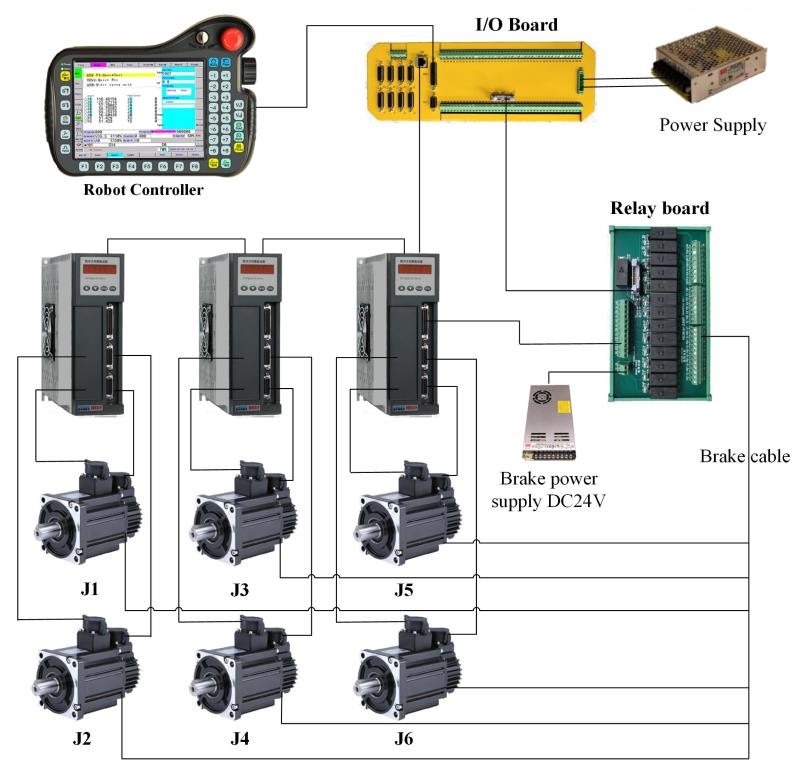
नियन्त्रक प्यानल: ठूलो स्क्रिनको LCD डिस्प्ले, भाषा प्रदर्शन विधि ग्राहकको आवश्यकता, सरल र स्पष्ट सञ्चालन र प्रोग्रामिङमा आधारित हुन सक्छ, अनलाइन प्यारामिटर परिमार्जन र गल्ती आत्म-निदान कार्यहरू सहित।
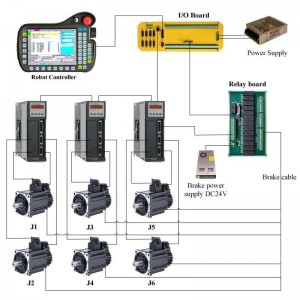
रोबोट नियन्त्रण क्याबिनेट: बुद्धिमान गति नियन्त्रण प्रणालीले औद्योगिक कम्प्युटर प्रविधि अपनाउँछ, र अल-डिजिटल सर्वो मोड्युलले रोबोटको प्रत्येक जोइन्टको एसी सर्वो मोटरहरूको लागि ड्राइभिङ पावर प्रदान गर्दछ।
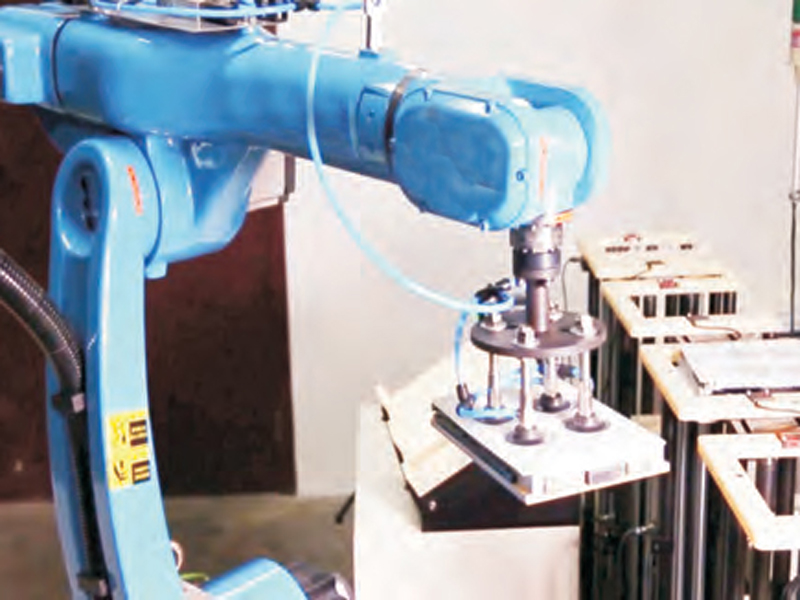
रोबोटिक फिक्स्चरहरू: टुलिङ फिक्स्चरले अनुकूलित आवश्यकताहरू अनुसार फरक गुरुत्वाकर्षण र मात्रा छनौट गर्न सक्छ, र यो अन्तिम फ्ल्यान्जमा स्थापित छ, जुन समायोजन गर्न सजिलो छ र यसको प्रयोगको विस्तृत दायरा छ।